
Das Wissenschaftliche Labor ist eine großartige Möglichkeit, um schon während der HTL-Laufbahn einen Eindruck auf das mögliche spätere Studium an der FH in Wels zu bekommen. Diese Chance ergriffen einige interessierte Schüler und versammelten sich dazu insgesamt vier Mal nach dem regulären Unterricht, um sich je einen Nachmittag mit einem aus sechs möglichen Themen zu beschäftigen. Natürlich mussten sie dabei nicht auf die Hilfe der Professoren der FH Wels verzichten, die den Schülern viel Interessantes übermitteln und auch in individuellen Gesprächen einige Fragen beantworten konnten.
Workshop 1: Automatisiertes Greifen mit HALCON Bildverarbeitung und einem Stäubli SCARA Roboter

Der Workshop begann mit einer prägnanten Einführung in die HALCON Bildverarbeitungssoftware. Die Teilnehmer lernten die Grundlagen der Bildverarbeitungstechniken kennen, einschließlich Objekterkennung, -lokalisierung und -klassifizierung. Besonders interessant waren dabei die Anwendungen dieser Techniken in der Industrie, insbesondere im Bereich der Robotik und Automatisierung. Im Anschluss daran erfolgten Live-Demonstrationen, bei denen die Teilnehmer die Möglichkeit hatten, die HALCON Software in Aktion zu erleben. Sie sahen, wie die Software in der Lage war, Objekte in Echtzeit zu erkennen und deren Position präzise zu bestimmen. Dies bildete die Grundlage für den nächsten Schritt des Workshops: die Integration dieser Informationen in die Steuerung eines Stäubli SCARA Roboters.
Während der praktischen Demonstrationen konnte beobachtet werden, wie der Stäubli Roboter die erkannten Objekte effizient und genau griff und manipulierte. Die Teilnehmer erhielten ebenfalls Einblicke in die Programmierung des Roboters.
Durch die Kombination von HALCON Bildverarbeitung und einem Stäubli SCARA Roboter wurden die Teilnehmer mit einer leistungsstarken Lösung vertraut gemacht, die ihnen helfen kann, Produktionsprozesse zu optimieren und die Effizienz zu steigern.
~Nico Kreilhuber
Workshop 2: Kollabortives Greifen mit UR10 und MIR100 AGV
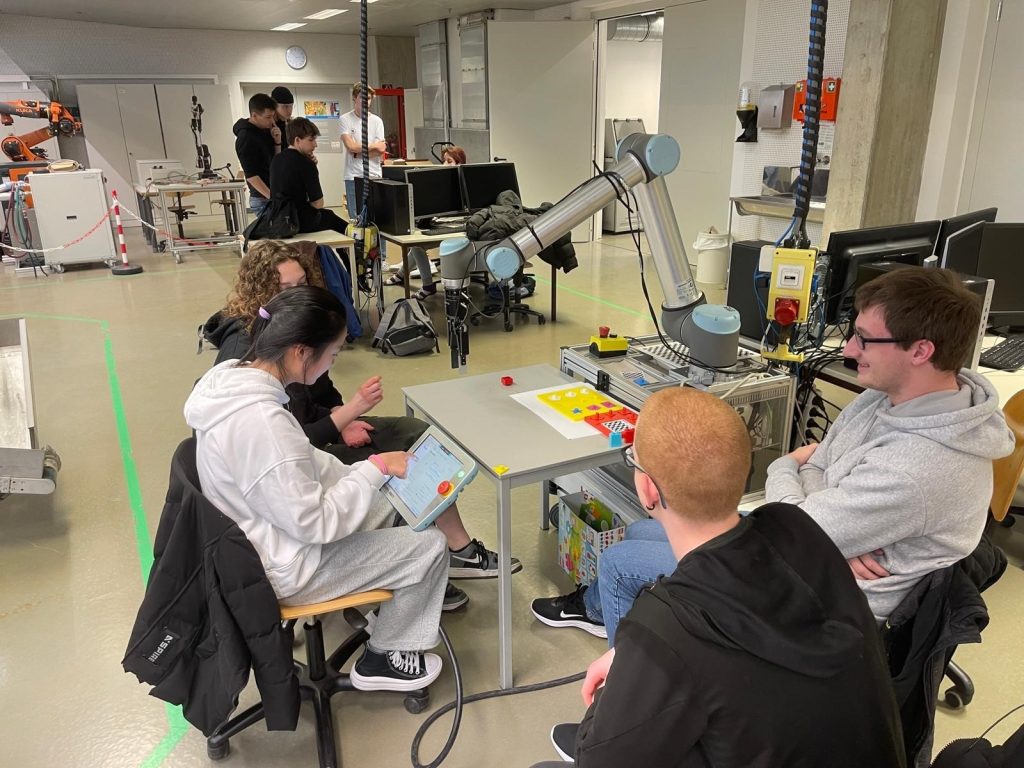
Im Workshop „Kollaboratives Greifen“ wurde mit einem kollaborativen Roboter gearbeitet, um zu zeigen was passiert, wenn Mensch und Maschine aufeinanderstoßen.
Kollaborative Roboter sind dazu da um im gleichen Arbeitsbereich wie Menschen zu arbeiten. Dabei ist Sicherheit natürlich oberste Priorität, weswegen der Roboter bei sämtlicher Berührung sofort anhält.
Programmiert wurde der Roboter mit einer Graphischen Programmiersprache, die den Roboter mit einfachen Blöcken zum Greifen und Fahren bewegte. Der ganze Prozess war komplett sicher, schnell und darüber hinaus noch sehr interessant.
Mit Kameraerkennung wollte man danach den Status des Arbeitsplatzes auslesen und bestimmen. Trotz fehlender Zeit waren die ersten Schritte in diese Technologie überaus interessant und zeigen, wie einfach es ist kollaborative Roboter in eine menschliche Umgebung zu integrieren.
~Kelvin Maringer
Workshop 3: 3D Druck / Additive Fertigung
Verschiedene Verfahren der additiven Fertigung. Beim Metall 3D Drucker wird die Platte mit Metallpulver befüllt. Ein CNC- gesteuerter Laser verschweißt punktgenau das Pulver zu einem soliden Körper. Zur Nachbearbeitung müssen die 3D gedruckten Teile sandgestrahlt und geschliffen werden, um überstehendes Stützmaterial zu entfernen und die Oberflächenbeschaffenheit zu verbessern. Ein gedruckter Globus wurde von jedem Teilnehmer nachbearbeitet und durfte mit nach Hause genommen werden.
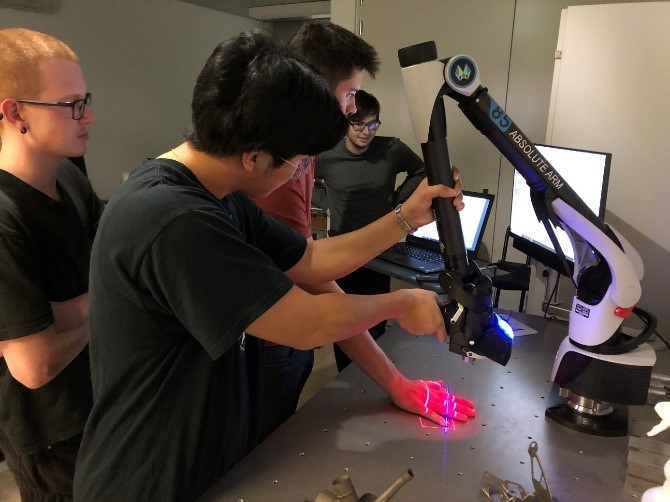
Weitere 3D Druck Verfahren wurden vorgestellt und teilweise ausprobiert. Die Vorteile und Anwendungsbereiche der verschiedenen Verfahren wurden dargestellt. Für Reverse-Engineering wurde ein 3D Scanner vorgestellt, wodurch man direkt ein 3D-Modell des gescannten Modells erhält. Dadurch können komplexe Teile eingescannt und anschließend am Computer bearbeitet und verbessert werden.
~ Jien Wong
Workshop 4: AR/VR in der Industrie
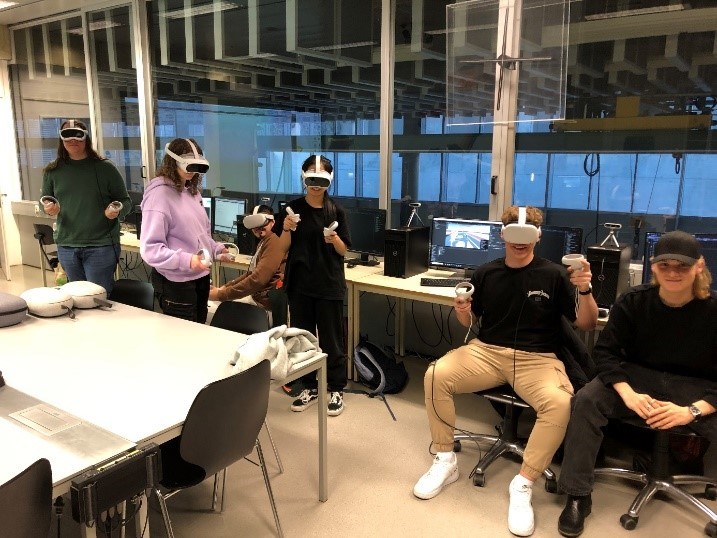
Im Workshop „AR/VR in der Industrie“ wurde mithilfe des Programms „Unity“ ein Modell eines Förderbandes erstellt, um den Teilnehmern einen Einblick in die Welt der digitalen Inbetriebnahme und des AR-Zwillings zu geben.
Der Unterschied zwischen VR, einer kompletten virtuellen Welt, und AR, einer mit der virtuellen Welt vermischte Projektion der Realität, wurde eindrucksvoll mithilfe von Beispielen auf Apps dargestellt.
AR kann vor allem für Lehrgänge und Einschulungen effektiv verwendet werden. Die Technologie erlaubt es Lernenden, die Maschine interaktiv und gefahrlos kennenzulernen.
In Unity wurde dann mithilfe einiger vorgefertigter Skripten, Modellen und Texturen, und etwas selbst programmierten Code in C#, ein Förderband erstellt, welches später durch Knopfdruck steuerbar war.
Auch besprochen wurde das Konzept von virtuellen Schaltern und Sensoren, die im Verlauf des Nachmittags ebenfalls in das virtuelle Welt implementiert wurden.
~Raphael Raberger
Workshop 5: KI / Bildverarbeitung mit RaspberryPI

Bildverarbeitungsschritte sowie die Handhabung mit dem Mikrocomputer RaspberryPI wurden vorgestellt. Durch selbständiges Experimentieren der einzelnen Bildverarbeitungsprozesse konnte ein Video mit dem RaspberryPI aufgenommen werden bei dem das Programm die Augen eines Menschen erkennen kann.
~ Klaus Mayerhofer
Workshop 6: Condition Monitoring mittels KI
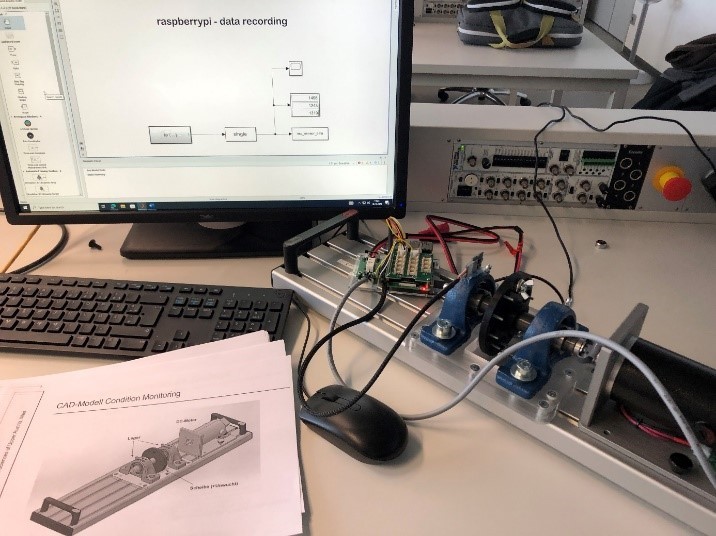
Im Workshop „Condition Monitoring mittels KI” bekamen wir einen Überblick darüber, wie man Daten von Sensoren erhält und anschließend mittels KI auswertet, um frühzeitig Fehler zu erkennen. Dies ist wichtig, da es den Unternehmen auf der einen Seite die oftmals teuren Reparaturen ersparen kann, aber auch den Mitarbeitern mehr Sicherheit im Arbeitsumfeld gibt. Beispielsweiße können Sensoren schon anhand von ungewöhnlichen Vibrationen eine Warnung ausgeben, während wir Menschen erst durch seltsame Geräusche, Rauchentwicklung oder starken Verschleiß erkennen, dass etwas nicht stimmt.
Im Workshop bekamen die Schüler außerdem die Chance mit einem kleinen Modell und einer speziellen Software zu arbeiten, mit denen sich auch die Studierenden beschäftigen.
~ Elias Schobesberger








